こんばんは!
今回は6軸加速度センサを使っていきます。
概要
6軸加速度センサ(MPU6050)を使ってxyz方向の加速度と角速度を検出する。
使用するもの
・Arduinoメインボード(https://amzn.to/2vkPIUH)
・USBケーブル(https://amzn.to/2UHhntl)
・ジャンパワイヤ (https://amzn.to/39uBU8T)
・LED(https://amzn.to/2TvEPGc)
・6軸加速度センサMPU6050(https://amzn.to/2FoaTci)
加速度センサとは
加速度センサとは名前の通り、加速度を検出するセンサです。
揺れや衝撃などを検出することができ、スマートフォンにも内蔵されており、カメラの手ぶれ防止やL〇NEのふるふる機能なども加速度センサを利用しています。
加速度センサからの検出はxyzそれぞれの軸に対して単位をgとして値を取得できます。
ジャイロセンサとは
ジャイロセンサとは角速度が検知できるセンサです。
検知した角速度から角度を計算することや、振動を検知することができ、こちらもゲームコントローラやカメラの手ぶれ防止などに利用されています。
MPU-6050について
MPU-6050はInven Sense(インベンセンス)製の6軸加速度センサです。
xyz方向の加速度、xyz軸周りの角速度を検出することができます。
・ジャイロの最大範囲±250,±500,±1000,±2000(°/sec)
・加速度の最大範囲±2,±4,±8,±16(g)
の中から適切なものを選ぶことができます。
今回は±250(°/sec),±2(g)を選択しました。
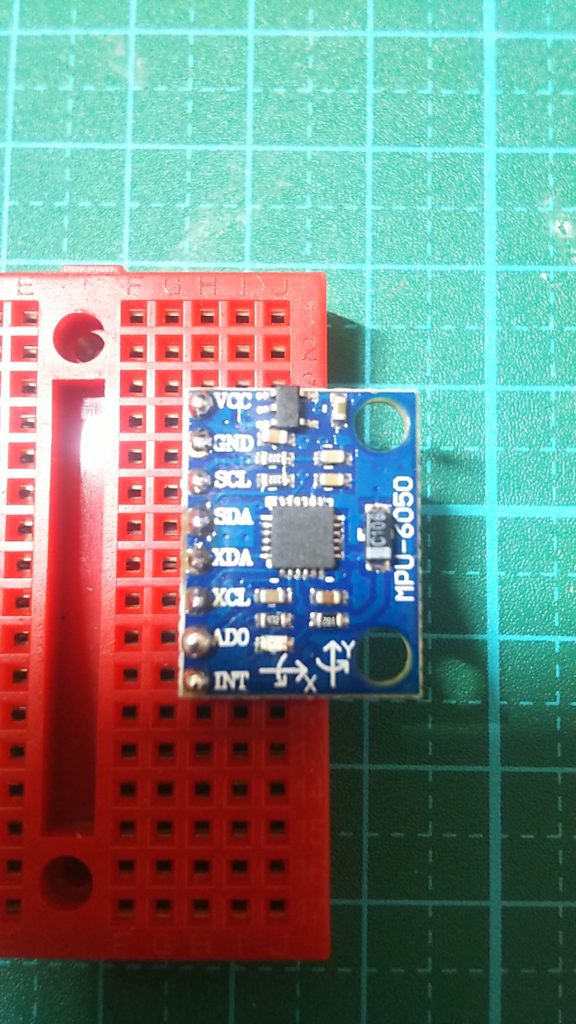
全部で8ピンあり、上からVCC,GND,SCL,SDA,XDA,XCL,AD0,INTとなっています。
今回はVCC,GND,SCL,SDA,AD0のみ使用します。
安価で性能が高いのですが、日本語のデータシートがなく(あるかもしれませんが自分は見つけられませんでした。)英語のデータシートを見なければならなく、しかも文量がとても多く、少々扱うのが面倒です。
手順
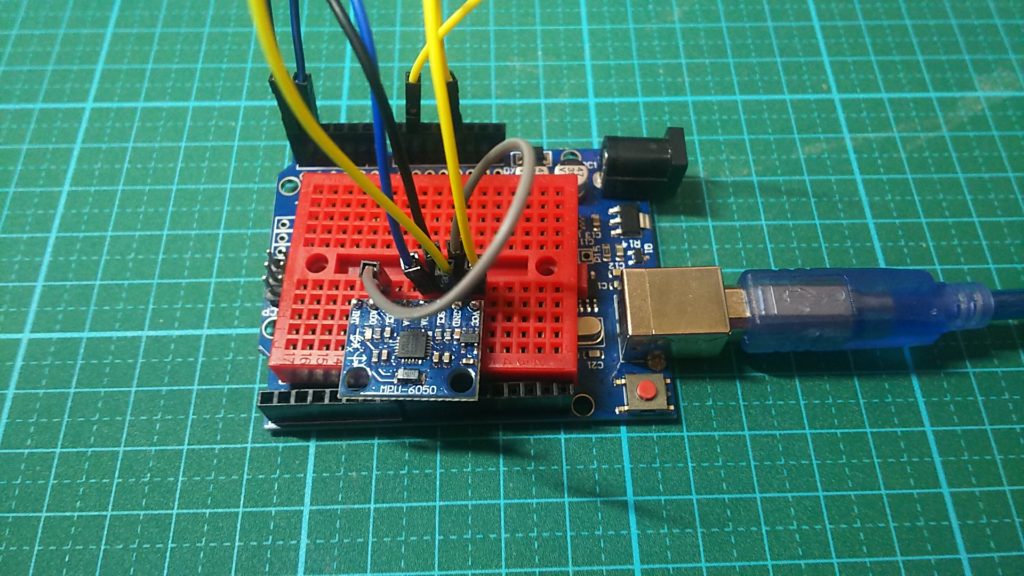
まずハード側からやっていきます。
以下の図のようにArduinoとMPU-6050を接続します。
| Arduino | MPU-6050 |
| GND | GND |
| 3.3V | VCC |
| A5 | SCL |
| A4 | SDA |
これでハード側は終わりです。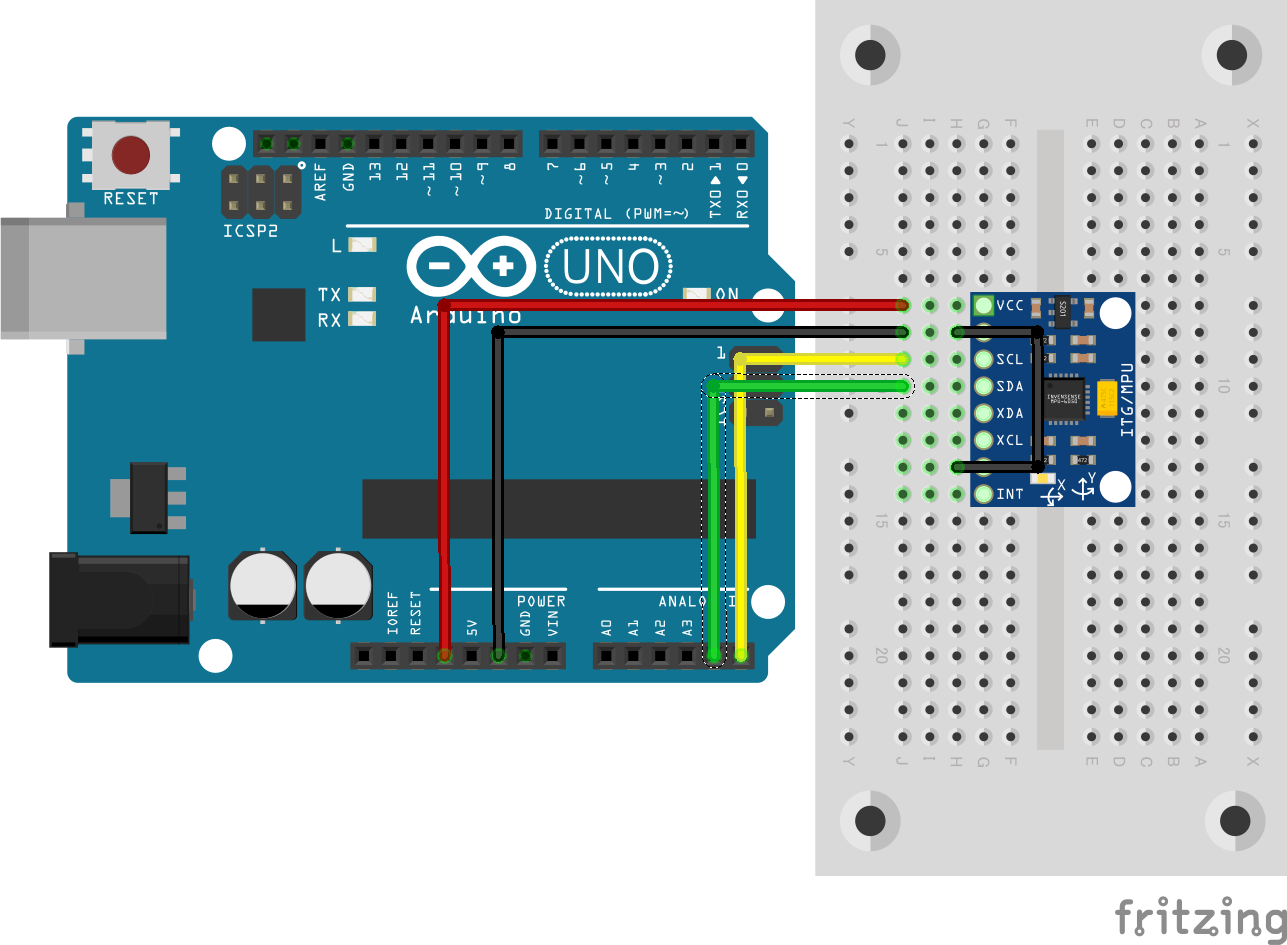
次にArduino IDEに次のプログラムを書きます。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 | #include <Wire.h> long accelX, accelY, accelZ; float gForceX, gForceY, gForceZ; long gyroX, gyroY, gyroZ; float rotX, rotY, rotZ; void setup() { Serial.begin(9600); Wire.begin(); setupMPU6050(); } void loop() { recordAccelRegisters(); recordGyroRegisters(); printData(); delay(200); } void setupMPU6050() { //MPU6050との通信を開始し、ジャイロと加速度の最大範囲を指定 Wire.beginTransmission(0b1101000); //I2C address of the MPU Wire.write(0x6B); //Accessing the register 6B Wire.write(0b00000000); //SLEEP register to 0 Wire.endTransmission(); Wire.beginTransmission(0b1101000); Wire.write(0x1B); //Accessing the register 1B - Gyroscope Configuration Wire.write(0x00000000); //gyro to full scale ± 250deg./s Wire.endTransmission(); Wire.beginTransmission(0b1101000); Wire.write(0x1C); //Accessing the register 1C - Acccelerometer Configuration Wire.write(0b00000000); //accel to +/- 2g Wire.endTransmission(); } void recordAccelRegisters() { //加速度読み取り Wire.beginTransmission(0b1101000); Wire.write(0x3B); // Accel Readings Wire.endTransmission(); Wire.requestFrom(0b1101000, 6); //Request Accel Registers (3B - 40) while (Wire.available() < 6); accelX = Wire.read() << 8 | Wire.read(); //Store first two bytes into accelX accelY = Wire.read() << 8 | Wire.read(); //Store middle two bytes into accelY accelZ = Wire.read() << 8 | Wire.read(); //Store last two bytes into accelZ calculateAccelData(); } void calculateAccelData() { //読み取った値をgに変換 gForceX = accelX / 16384.0; gForceY = accelY / 16384.0; gForceZ = accelZ / 16384.0; } void recordGyroRegisters() { //ジャイロの値を読み取る Wire.beginTransmission(0b1101000); //I2C address of the MPU Wire.write(0x43); //Starting register for Gyro Readings Wire.endTransmission(); Wire.requestFrom(0b1101000, 6); //Request Gyro Registers (43 - 48) while (Wire.available() < 6); gyroX = Wire.read() << 8 | Wire.read(); //Store first two bytes into accelX gyroY = Wire.read() << 8 | Wire.read(); //Store middle two bytes into accelY gyroZ = Wire.read() << 8 | Wire.read(); //Store last two bytes into accelZ calculateGyroData(); } void calculateGyroData() { //読み取った値をdeg/secに変換 rotX = gyroX / 131.0; rotY = gyroY / 131.0; rotZ = gyroZ / 131.0; } void printData() { //シリアルモニタに出力 Serial.print("Gyro"); Serial.print(" X="); Serial.print(rotX); Serial.print("deg/sec"); Serial.print(" Y="); Serial.print(rotY); Serial.print("deg/sec"); Serial.print(" Z="); Serial.print(rotZ); Serial.print("deg/sec"); Serial.print(" Accel"); Serial.print(" X="); Serial.print(gForceX); Serial.print('g'); Serial.print(" Y="); Serial.print(gForceY); Serial.print('g'); Serial.print(" Z="); Serial.print(gForceZ); Serial.println('g'); } |
こちらのプログラムはほとんどこの動画を参考にしました(一部見やすくするようコメントを記述し、改変しています)。
プログラムの説明をしていきます。
まず#include <Wire.h> でWire.hというI2C通信をする処理が書かれているファイルを取り込みます。
ダウンロードはこちらからできます。
次にsetup内でシリアル通信の開始、I2c通信の初期化、MPU-6050とI2c通信の開始をしています。
loop内では加速度、角加速度の読み取り、また、シリアルモニタへの出力をしています。
これをマイコンボードに書き込み、シリアルモニタを見ると
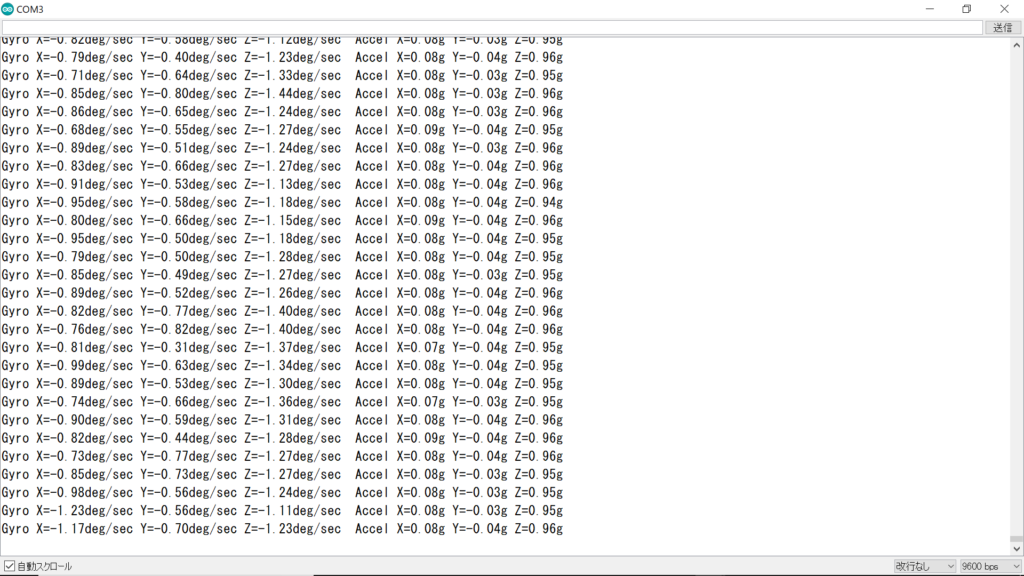
ほぼ水平状態の机の上においているので、z軸の加速度がほぼ1gになっており、正しく読み取れていることがわかると思います。
回したり、動かしたりすると数値が変化するので試してみてください。
まとめ
今回は6軸加速度センサを使ってみました。
MPU-6050は扱いが少し難しいですが、安価で精度もよいので使えるようになると便利だと思います。
今回はこれでおわります。
ではまた!