こんばんは!
ロボットアーム製作の第一弾、今回はグリッパー製作です。
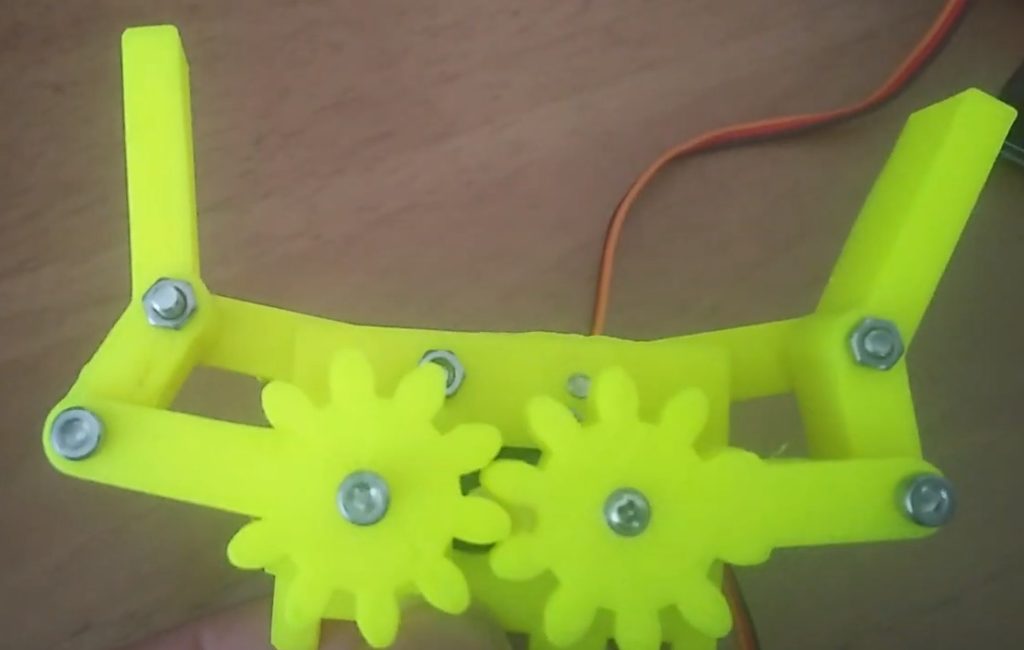
今回作ったものはこちらです。
設計
まず、グリッパーを設計します。
今回はFusion360という3DCADソフトを使用しました。
設計とっても何か計算してやったのではなくて、感覚でやったので、設計というよりお絵描きといった方が正しいもしれません…
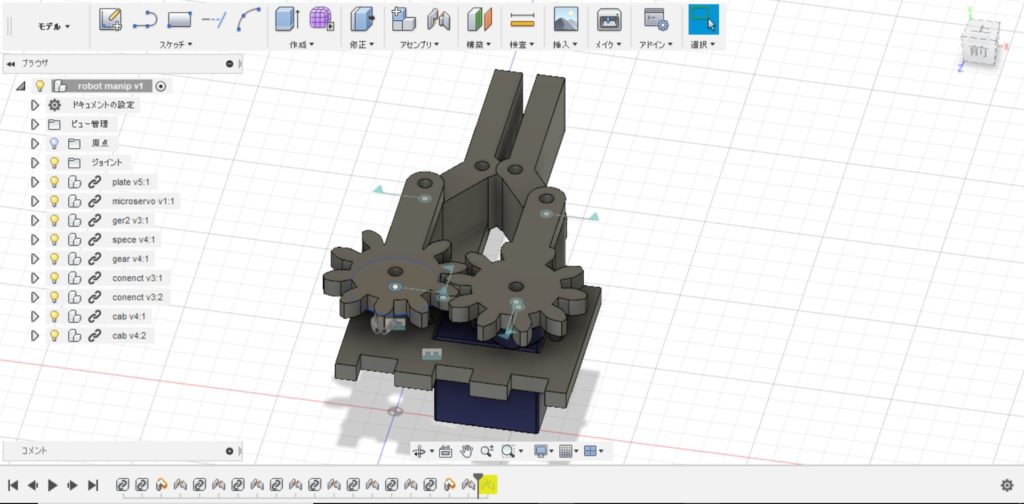
テキトーにお絵描き
組み立て
モデリングができたらSTL形式で保存して、パーツごとに3Dプリンターで出力して組み立てます。
配線・プログラム
まず、サーボモータとArduino UNOを次のように接続します。
| サーボモータsg90 | Arduino UNO |
| 赤 | 5V |
| 黒 | GND |
| オレンジ | デジタル3番ピン |
次にコードを書いていきます。
まず、Arduino IDEを起動して以下のコードを記述してください。
1 2 3 4 5 6 7 8 9 10 11 | #include <Servo.h> Servo myservo; void setup() { myservo.attach(9); myservo.write(90); } void loop() { } |
記述したらマイコンボードに書き込んでください。
プログラムの通り、今サーボモータの位置は90°になっているので、図のように90°の時にアームが閉じるようにしてください。
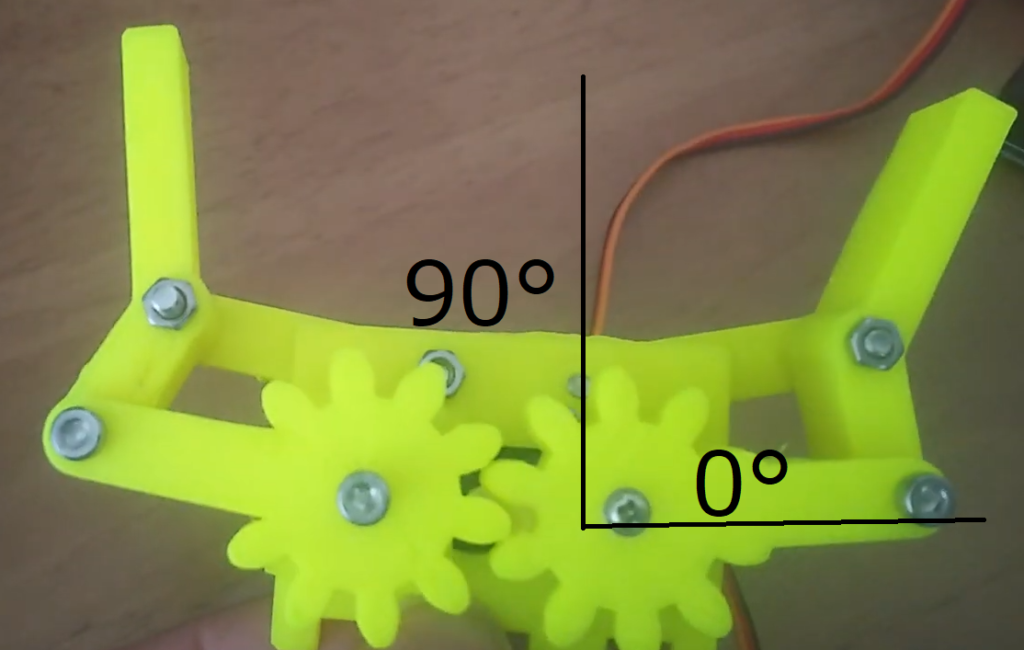
このように組み立てると、90°のときにアームが閉じ、0°でアームが全開になります。
実際にアームを動かすために次のコードを記述してください。
1 2 3 4 5 6 7 8 9 10 11 12 13 | #include <Servo.h> Servo myservo; void setup() { myservo.attach(9); } void loop() { myservo.write(90); delay(1000); myservo.write(0); delay(1000); } |
記述したらマイコンボードに書き込んでください。
冒頭の動画のようにアームが動くと思います。
終わりに
ロボットアーム製作の第一回としてアームグリッパーを制作してみました、次回以降はロボットアームの胴体部分も作成していきます。
今回使用したサーボモータsg90ではトルクが小さいためつかめるものに限界があるかもしれません、重量のあるものをつかめるようにしたい場合はもっとトルクのあるサーボモータを使用した方がいいと思います。